Torpedo Launcher Prototype
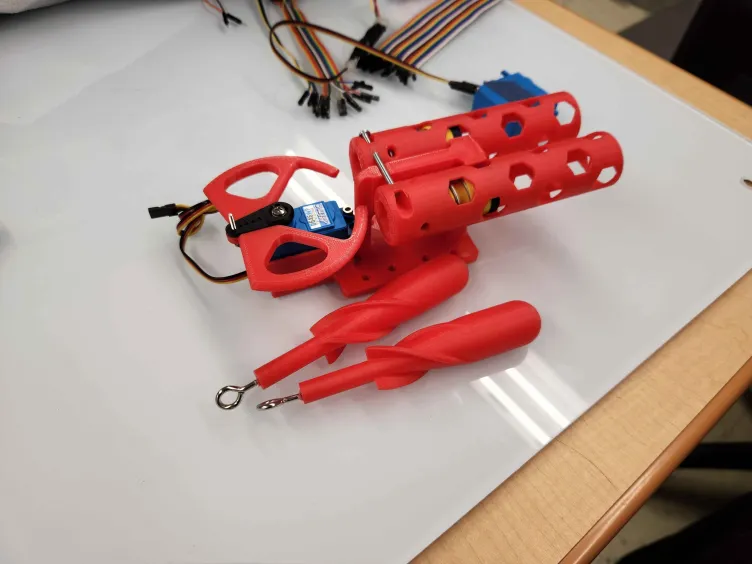
This fall semester, as the new Mechanical team lead I’ve taken initiative to help resurrect projects that haven’t been touched since during or even before my freshman year. Currently, we’re working on refining this dual torpedo launcher prototype, before moving on to finishing touches for the AUVs it will interface with. The AUVs will fire two torpedos at different points within the underwater obstacle course during the RoboSub competition. Tests to fire the torpedos and determine their buoyancy have revealed the need for significant structural changes (such as those highlighted in the annotated photo), which I’ll continue walking my underclassmen teammates through to help them develop their CAD skills. Fortunately, these tests also acted as a successful proof-of-concept for my design, in that at least we’re on the right track, which is very encouraging since no work has been done for the torpedo competition objective in years.


The most recent iteration was a single-torpedo launcher, with a launch pad compressing a spring and held by a retractable pin. Anticipating that this would put a lot of asymmetric stress on the servo that held the pin, as well as other components, my teammate Andrew and I came up with a C-shaped ring that will slip out of eye-bolt hooks attached to the torpedo by rotating to fixed angles. This lets it release the springs smoothly, allowing two torpedos to be fired independently by the same servo, while simultaneously reducing load on that servo. I also designed the torpedos themselves, attempting to achieve good stability and precise trajectories underwater by 3D-printing them with helical fins, and the launcher tubes and base plate from which they are fired.